ROS2
ROS2インストール
Raspberry Pi 5 とCompute Module 5 へROS2 Jazzy をインストールしました。
Bookworm 64 , X11,仮想環境なしでビルドしています。
32GBのSDカードでも入りますが、残りの容量が7GB程度になりました。
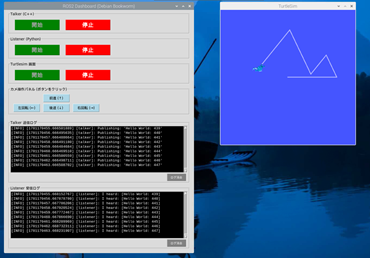
tkinter上で、下記4つを実行させています。
talker : ros2 run demo_nodes_cpp
listener : ros2 run demo_nodes_py
turtlesim pub : ros2 run turtlesim turtle_teleop_key
turtlesim sub : ros2 run turtlesim_node
turtlesimでは、矢印キー ボタンを押すと、カメが動きます。
30年以上前から産業用ロボットコントローラーの開発をしており、
当時はIntel 80186,80386,ルネサスSH4などの元祖ROS? ハード/ソフトウェアに
携わってきましたが、手法は大きく変わってきましたね。
Bookworm 64 , X11,仮想環境なしでビルドしています。
32GBのSDカードでも入りますが、残りの容量が7GB程度になりました。
tkinter上で、下記4つを実行させています。
talker : ros2 run demo_nodes_cpp
listener : ros2 run demo_nodes_py
turtlesim pub : ros2 run turtlesim turtle_teleop_key
turtlesim sub : ros2 run turtlesim_node
turtlesimでは、矢印キー ボタンを押すと、カメが動きます。
30年以上前から産業用ロボットコントローラーの開発をしており、
当時はIntel 80186,80386,ルネサスSH4などの元祖ROS? ハード/ソフトウェアに
携わってきましたが、手法は大きく変わってきましたね。